产品:93
产品:93
 联系我们
联系我们

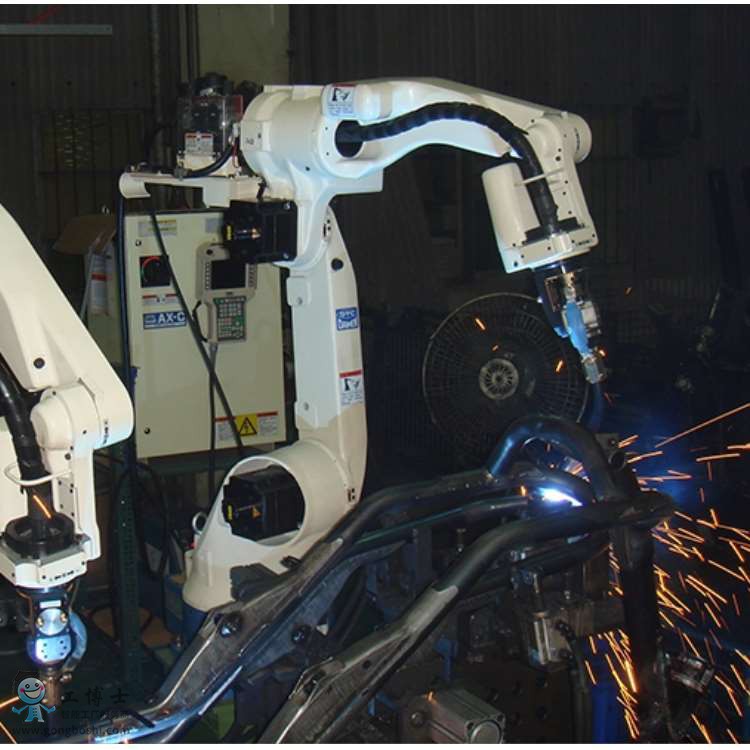
OTC焊接机器人主要应用到具有附加轴的焊接机器人。其控制系统采用32位CPU控制,以提高机器人运动插补运算和坐标变换,的运算速度;采用64位数字伺服驱动单元,同步控制6轴运动,运动精度大大提高,多可控制21轴,进一步改善了机器人动态特性,支持离线编程技术,技术人员可通过离线编程软件设置参数,优化机器人运动程序;控制器内部结构相对集成化,这种集成方式具有结构简单、整机价格便宜且易维护保养等特点FANUC焊接机器人控制系统的结构与设计摘要:本文对首先焊接机器人的概念及其结构做了介绍,并对其各个系统的功能进行描述。重点分析了FANUC焊接机器人的控制系统的结构,阐述了该控制系统主要的硬件组成部分,即CPU,运动控制卡,伺服驱动器的设计思路。关键词:控制系统、焊接机器人、硬件设计焊接。
OTC焊接机器人是从事焊接的工业机器人四。根据国际标准化组织(ISO)工业机器人术语标准的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域焊接机器人主要包括机器人和焊接设备两部分。
OTC焊接机器人由机械部分、传感部分、控制部分三大部分组成。这三大部分可分成驱动系统、机械结构系统、感受系统、机器人一环境交互系统、人机交互系统、控制系统六个子系统口。
新闻中心