
 产品:93
产品:93
 联系我们
联系我们

焊接机器人是目前*大的工业机器人应用领域。由于汽车制造业对许多构件的焊接精度和速度等指标提出越来越高的要求,一般工人已难以胜任这一工作;此外,焊接时的火花及烟雾等,对人体造成危害,因此,焊接机器人在汽车制造变显得非常重要。
焊接机器人的电压、电流与焊速需要匹配才能达到理想的焊接效果。焊接机器人的相应脉冲峰值电流值较高,一般都在几十安培左右,甚至达到100A以上。由于电缆存在内阻,所以在机器人工作时,会产生很大的热量。这些热量必须有效的散去,否则可能会给设备带来致命的损坏,所以,机器人在供电电缆处会有冷却水管。
但由于车身焊接机器人的电缆线因经常处于运动状态,在折叠处电缆线和冷却水管较易发生断裂,该故障发生概率较高,也是设备维护部门重点关注的现场。维护部门可以根据机器人电缆表现出来的温度分布及变化趋势,从而非常方便对机器人进行维护和操作。
热像仪为什么能够对焊接机器人进行温度检测?
红外热像仪是通过非接触探测红外能量(热量),并将其转换为电信号,进而在显示器上生成热图像和温度值,并可以对温度值进行计算的一种检测设备。
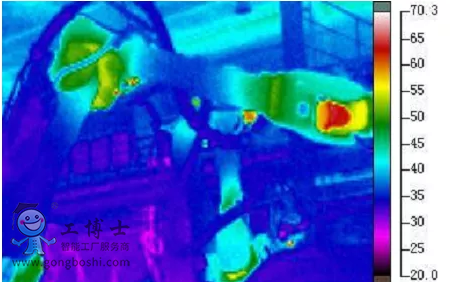
汽车工程师可以利用红外热像仪快速、方便的获取焊接机器人电缆在机器人工作的过程中,电缆的温度分布及温升,机器人轴承部件温度的二维红外图像,进行焊接机器人的维护,减少意外的停工、停产损失。

上图可以看出,在固定处,电缆在P0处的温度在74.1℃,而在P1处的温度则为66.3℃,这说明在P0处的冷却效果不好。
下图是割裂后发现的冷却水管断裂图。

典型客户
通用汽车、上海大众、一汽大众、东风神龙、广州本田、广州丰田等。
红外热像仪的独特应用
目前,由于没有很好的检测手段,部分维护工程只好采用点温仪来进行检测和维护,但工程师常常感到目前这种检测方法存在很大的弊端就是测不准。这是因为距离较远时电缆目标较小,而点温仪采样范围比电缆直径大,导致温度测量不准确。红外热像仪和点温仪比较,有很多优点:
1 能够测试较小目标;
2 更加直观、方便、准确;
3 检测效率高。
拍摄时可能会遇到哪些问题?
1 拍摄场合的各种线路复杂,需要辨别清目标;
2 现场注意安全。
如何才能拍摄优质的红外图像?
使用红外热像仪进行拍摄时,若要得到一幅优质的红外热图,我们建议:
1 拍摄焦距应尽量对准目标;
2 先使用自动模式测量的温度范围;然后手动设置水平及跨度,将温度范围设置在*小,并包含有先前测量的温度范围;
了解更多:OTC焊接机器人